LewanSoul Robotic Arm Kit 6DOF Programming Robot Arm with 5 Servo, Handle, Mechanical Claw and More, PC Software APP Control with Tutorial
Product Description
LewanSoul Robotic Arm Kit 6DOF Programming Robot Arm with 5 Servo, Handle, Mechanical Claw and More, PC Software APP Control with Tutorial
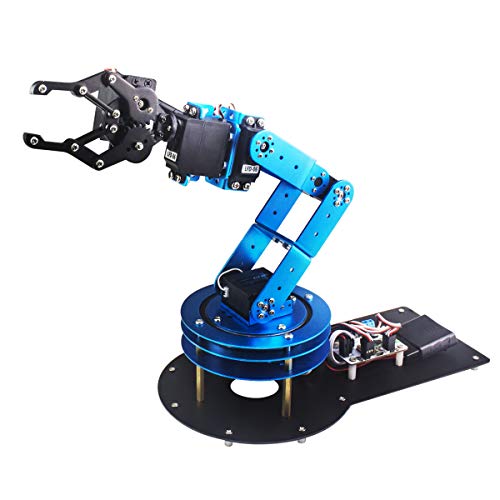
- Spark Your Creativity with LeArm Robotic Arm: LeArm is an elementary 6DOF desktop robot arm outfitted with 6 high-quality digital servos.It is capable of remote-control grasping, object transportation, custom actions, graphical programming, and more. It serves as the ideal platform for building and showcasing creative projects and for learning about bionic robotics.
- Anti-stall Protection: The robot arm end is equipped with 3 anti-blocking servos, complete with gear clutches that significantly extend the servos' lifespan.
- Premium Structure Design: The robot arm is constructed from exquisite metal bracket. The base is fortified with high-torque servos and industrial-grade bearings, guaranteeing exceptional stability.
- Various Control Methods: It supports PC, app, mouse and wireless handle control. Users can control the robot at your fingertips.
- Enjoy Robotic Arm Making: Enjoy the robot assembly process, LeArm is great for learning and building robot structures! Designed for students, engineers, university courses, and robot lovers. Comes with easy tutorials and simple programming software.
<b>Features:</b><br /> Metal Construction: Aluminum Bracket + Metal Larger Bottom Plate<br /> <br /> 6DOF structural design can make the robotic arm move flexibly, so it can grab objects in any direction<br /> <br /> All using high-precision digital servo, which make control more accurate<br /> -LDX-218: 17kg large torque, full metal gear, dual ball bearing, pluggable wire.<br /> -LFD-06: high temperature resistance, use for metal claw.<br /> -LD-1501MG: 17kg large torque, full metal gear, use for large bottom plate.<br /> <br /> Support various control methods, we provide wireless handle and free Android/iOS APP, It is convenient for you to remotely control the robotic arm; Provide graphical PC software(Windows Only), it's easy to write action group you want<br /> <br /> Uses 6 channel servo controller with build-in bluetooth 4.0 module<br /> -All interfaces have over-current protection, which can reduce the risk of servo burned out due to locked-rotor<br /> -16M large capacity can hold 230 action groups, each action group can hold 1020 actions<br /> -Low voltage alarm<br /> -Support TTL serial communication, compatible for Arduino<br /> <br /> Provide detailed video tutorials to learn how to use LeArm; Provide 3D animation to show you how to assemble the robotic arm<br /> -Video Tutorials: http://bit.ly/2gtHLoo<br /> -3D animation: http://bit.ly/2wvNuy7<br /> <br /> Come with power adapter(without battery)<br /> -Input: 100V~240V, 50/60Hz<br /> -Output: 7.5V/3A<br /> <br /> We provide quality products and excellent service, if you have any questions, please feel free to contact us at [email protected].<br /> <br /> <b>Note:</b><br /> 1, The robotic arm is unassembled, please refer to our 3D animation to assemble the mechanical arm by yourself.<br /> 2, Please scan the QR code or access the link inside the package to get all information<br /> 3, it's not open resource, please ignore the label on the package<br />
Technical Specifications
You might also like

Charmed Labs Pixy2 Smart Vision Sensor - Object Tracking Camera for Arduino, Raspberry Pi, BeagleBone Black

Adeept Arduino Compatible DIY 5-DOF Robotic Arm Kit for Arduino UNO R3 | STEAM Robot Arm Kit with Arduino and Processing Code | with PDF Tutorial via Download Link

ELEGOO Upgraded 37 in 1 Sensor Modules Kit with Tutorial Compatible with Arduino IDE UNO R3 MEGA2560 Nano

LewanSoul Hiwonder Digital Servo Tester Servo Controller with Voltage Display

Mallofusa Servo Arm Horn Metal Aluminum 25t for Rc Car Helicopter Round Mg945 Mg995 Mg996 Silver/Red/Blue (Silver)

Pan/Tilt2 Servo Motor Kit for Pixy2 - Dual Axis Robotic Camera Mount

RDS3218 20KG 270 Degree U Mount RC Digital Servo - Waterproof Robot Motor Arm Servo - High Torque Full Metal Gear Servo with U Mounting Bracket for RC Robotic Arm Model DIY Baja Car 1/10 Scale Crawler

ELEGOO Mega 2560 Project The Most Complete Ultimate Starter Kit w/Tutorial Compatible with Arduino IDE

diymore Silver ROT3U 6DOF Aluminium Robot Arm Mechanical Robotic Clamp Claw Kits for Arduino(Unassembled Parts Without Servos)

ELEGOO UNO R3 Board ATmega328P ATMEGA16U2 with USB Cable Compatible with Arduino IDE Projects, RoHS Compliant